
Flip Model: A Design Pattern
This article was originally published in the December 2018 issue of ACCU Overload Journal.
In this article, I describe a design solution that I have adopted several times in the past while working on applications for the diagnosis of complex distributed systems. This solution worked well in several contexts, and it’s still proving robust in many running systems.
Although I know for sure it’s used by other developers, after some research I could not find any reference to it in the literature, and this finally convinced me to write about it.
After some thought, I decided to document it under the well-known form of a Design Pattern as I believe that it’s still a convenient way to discuss software design and architectural design (that – from my point of view – remain fundamental topics in Software Engineering and should not be neglected in favor of more mundane topics).
Furthermore, some young developers might not know the book Design Patterns that made history, so I hope this article might fill a gap and makes them curious about patterns and software design in general.
In the remainder of the article, I present the pattern following the classic documentation format proposed in the original book (see the ‘documentation’ section in the Wikipedia article or – even better – read the original book).
Pattern name and Classification
Flip Model (behavioral).
Intent
The pattern allows multiple clients to read a complex data model that is continuously updated by a unique producer, in a thread-safe fashion.
Also known as
Model publisher, Pressman, Newsagent.
Motivation (Forces)
Sometimes it’s necessary to decouple the usage of a complex data structure from its source, in such a way that every actor can run at their own pace without interfering with each other.
Consider, for example, an application that periodically retrieves information from a large sensor network to perform some kind of statistical elaboration on the collected data set and send alarms when some criteria are met. The data collected from the sensor network is structured in a complex lattice of objects resembling the ones you would find in the physical world so that the elaboration modules can navigate the data in a more natural way. The retrieval operation is a long, complex task, involving several network protocols, that is completely uncorrelated from the statistical analysis and alarms evaluation, and can possibly run in separated threads. Moreover, data retrieval and its usage have different timing (e.g., the sensor network is scanned every 5 minutes, while the statistical elaboration is performed on request by a human operator on the most recent collected dataset).
In this scenario, how can all the modules of the application work together on the same data structure? How can all the clients use the most updated data available in a consistent fashion? And how can the application get rid of the old data when it is no longer needed?
The main idea of this pattern is to pass the sensor data structure from the producer
to the consumers by means of two shared pointers (in C++) or two variables
(in languages with garbage collection): one (named filling) holding the object structure
currently retrieving the sensor data, the other (named current) holding
the most recent complete acquisition.
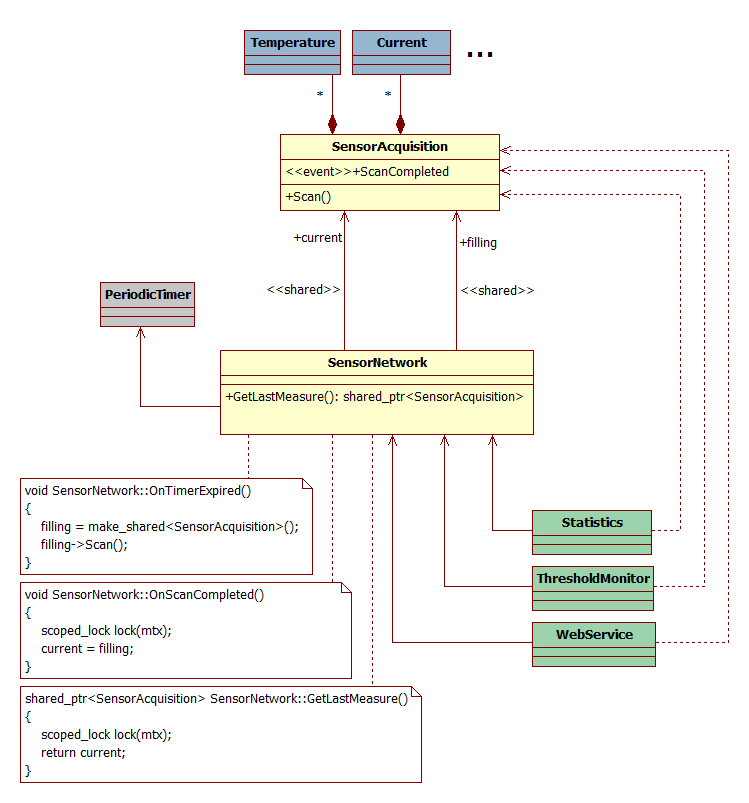
A class SensorNetwork decides when it’s time to start a new acquisition and replaces
current with filling when the acquisition is concluded. When a client needs to
perform some tasks on the data acquired, it contacts SensorNetwork, which returns
current (i.e., the most recent data acquired). An object of class
SensorAcquisition is kept alive and unchanged during the whole time a
client holds the smart pointer (and the same is still valid in garbage collected languages).
The data acquisition (performed by SensorAcquisition) and its reading
(performed by the various clients: Statistics, ThresholdMonitor and
WebService) are possibly executed in multiple threads. The safety of
the code is ensured by the following observations:
- a
SensorAcquisitionobject can be modified only by the thread ofSensorNetwork, and never changed after it becomes public (i.e., the smart-pointercurrentis substituted byfilling) - the smart pointer exchange is protected by a mutex.
It is worth noting that here the mutex is required because std::shared_ptr
provides a synchronization mechanism that protects its control-block but not
the shared_ptr instance. Thus, when multiple threads access the same shared_ptr
and any of those accesses uses a non-const member function, you need to provide
explicit synchronization. Unfortunately, our code falls exactly under that case
since the method SensorNetwork::ScanCompleted assigns the shared_ptr to a new value.
However, if the presence of a mutex makes you feel back in the eighties, please see the ‘Implementation’ section for some modern alternatives.
The following figure shows a typical Flip Model class structure.
Applicability
Use Flip Model when:
- You have a complex data structure slow to update.
- Its clients must asynchronously read the most updated data available in a consistent fashion.
- Older information must be discarded when is no longer needed.
Structure
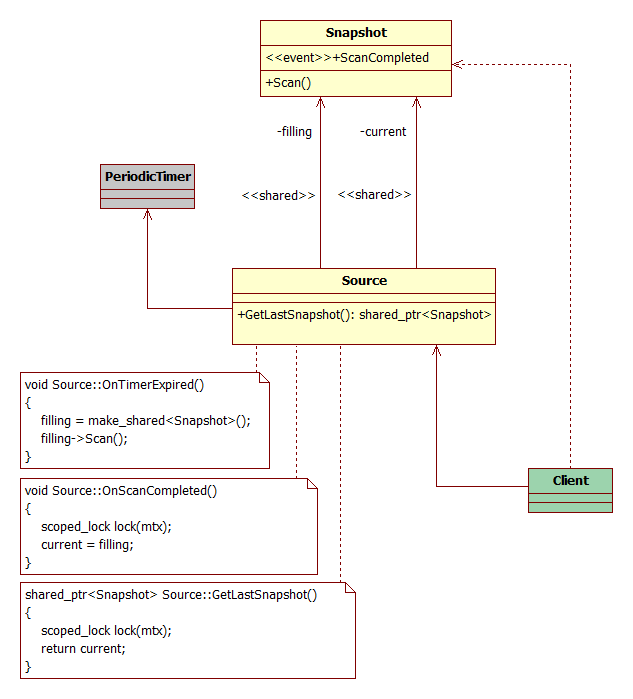
The following figure shows the structure.
Participants
Snapshot(SensorAcquisition)- Holds the whole set of data acquired by the source.
- Performs a complete scan.
- Possibly provides const function members to query the acquisition.
- Possibly is a set of (heterogeneous) linked objects (e.g., a list of
Measureobjects).
Source(SensorNetwork)- Periodically asks the source to perform a new scan.
- Provides the latest complete scan to its clients.
Client(WebService,ThresholdMonitor,Statistics)- Asks the
Sourcefor the latestSnapshotavailable and uses it (in read-only mode).
- Asks the
Collaborations
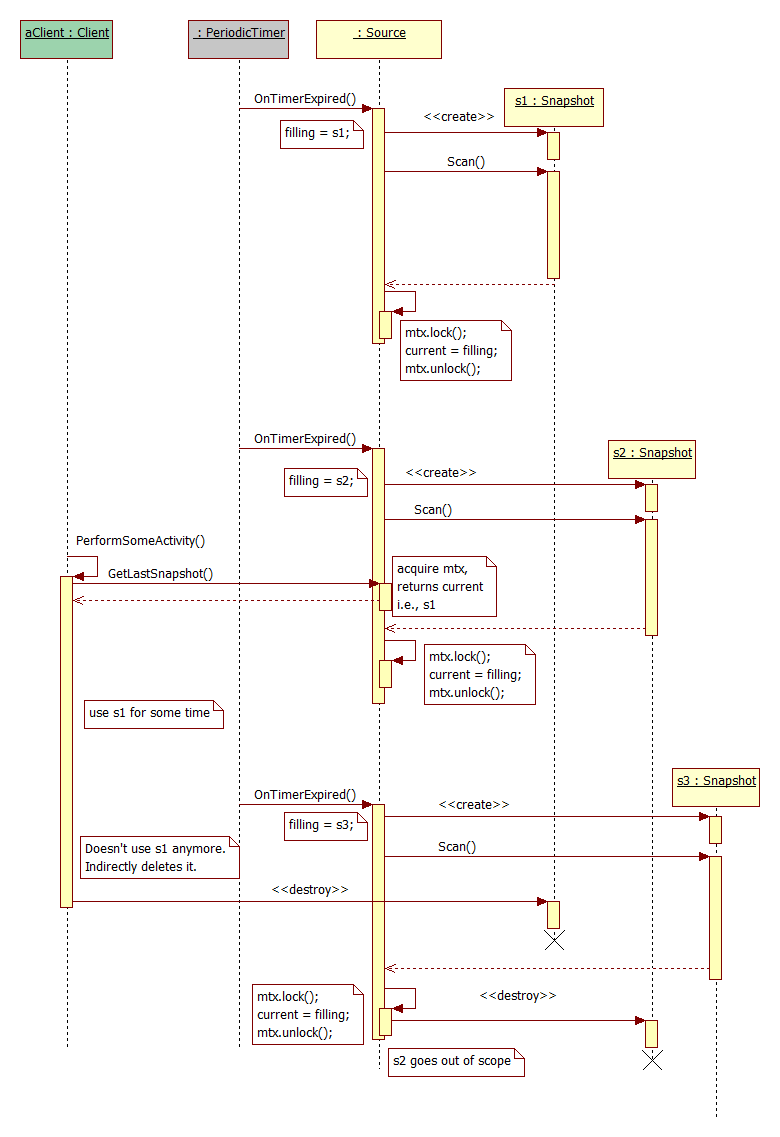
- Periodically,
Sourcecreates a newSnapshotinstance, assigns it to theshared_ptrfilling, and commands it to start the acquisition. - When the acquisition is terminated,
Sourceperforms the assignmentcurrent=fillingprotected by a mutex. If no clients were holding the previouscurrent, the pointedSnapshotis automatically destroyed (by the shared pointer). - When a client needs the most updated
Snapshot, itcalls Source::GetLastSnapshot()that returnscurrent.
The following figure shows the collaborations between a client, a source and the snapshots it creates.
Consequences
- Flip Model decouples the producer from the readers: the producer can go on with the update of the data (slow) and each reader gets each time the most updated version.
- Synchronization: producer and readers can run in different threads.
- Flip Model grants the coherence of all the data structures that are read in a given instant from a reader, without locking them for a long time.
- Memory consumption to the bare minimum to ensure that every reader has a coherent access to the most recent snapshot.
Implementation
Here are 8 issues to consider when implementing the Flip Model pattern:
-
A new acquisition can be started periodically (as proposed in the example) or continuously (immediately after the previous one is completed). In the first case, the scan period must be longer than the scan duration. Should the scan take longer, it is automatically discarded as soon as the timer shoots again.
-
The pattern is described using C++, but it can be implemented as well in languages with garbage collection. In C++,
std::shared_ptris necessary to ensure that aSnapshotis deleted when no client is using it andSourcehas a more updated snapshot ready. In a language with garbage collection, the collector will take care of deleting old snapshots when they’re no longer used (unfortunately this happens at some unspecified time, so there can be many unused snapshots in memory). -
The
std::shared_ptr(or garbage collection) mechanism will work correctly (i.e., old snapshots are deleted) only if clients useSource::GetLastSnapshot()every time they need a snapshot. -
Snapshot(and the application in general) can be synchronous or asynchronous.In the first case, the method
Snapshot::Scanis a blocking function and the caller (i.e.,Source) must wait until the data structure is completed before acquiring the mutex and assigningcurrenttofilling. Within a synchronous application, clients will run in other threads.In the second case, the method
Snapshot::Scanstarts the acquisition operation and returns right away. When the data structure is completed, an event notification mechanism (e.g., events, callbacks, signals) takes care to announce the end of the operation toSource, that can finally acquire the mutex before assigningcurrenttofilling. An asynchronous application can be single-thread or multi-thread. -
The pattern supports every concurrency model: from the single thread (in a fully asynchronous application) to the maximum parallelization possible (when the acquisition has its own threads, as well as each client).
When the acquisition and the usage of the snapshots run in different threads, a synchronization mechanism must be put in place to protect the
shared_ptr. While the simplest solution is to add a mutex, starting from C++11 you can use instead the overload functionsstd::atomic_...<std::shared_ptr>(and maybe from C++20std::atomic_shared_ptr). A point worth noting here is that the implementation of the atomic functions might not be lock-free (as a matter of fact, my tests with the latest gcc version show that they’re not): in that case, the performances are likely worse than the version using the mutex.A better solution could be to use an atomic
intas a key to select the rightshared_ptr(see the ‘Sample code’ section for more details). -
The objects composing
Snapshot(usually a huge complex data structure) are (possibly) deleted and recreated at every scan cycle. It’s possible to use a pool of objects instead (in this caseshared_ptrmust be replaced by a reference counted pool object handler). -
Please note that
Snapshot(and the classes it represents) is immutable. After its creation and the scan is completed, the clients can only read it. When a new snapshot is available, the old one is deleted, and the clients will read the new one. This is a big advantage from the concurrency point of view: multiple clients running in different threads can read the same snapshot without locks. -
Be aware of stupid classes!
Snapshot(and the classes it represents) should not be a passive container of data. Every class should at least contribute to retrieve its own data, and one could also consider whether to add methods and facilities to use the data.
Sample Code
The C++ code shown here sketches the implementation of the Flip Model classes described in the ‘Motivation’ section.
class SensorAcquisition
{
public:
// interface for clients
const SomeComplexDataStructure& Data() const { /* ... */ }
// interface for SensorNetwork
template <typename Handler>
void Scan(Handler h) { /* ... */ }
};
class SensorNetwork
{
public:
SensorNetwork() :
timer( [this](){ OnTimerExpired(); } )
{
timer.Start(10s);
}
shared_ptr<SensorAcquisition> GetLastMeasure() const
{
lock_guard<mutex> lock(mtx);
return current;
}
private:
void OnTimerExpired()
{
filling = make_shared<SensorAcquisition>();
filling->Scan([this](){ OnScanCompleted(); });
}
void OnScanCompleted()
{
lock_guard<mutex> lock(mtx);
current = filling;
}
PeriodicTimer timer;
shared_ptr<SensorAcquisition> filling;
shared_ptr<SensorAcquisition> current;
mutable mutex mtx; // protect "current"
};
class Client
{
public:
Client(const SensorNetwork& sn) : sensors(sn) {}
// possibly executed in another thread
void DoSomeWork()
{
auto measure = sensors.GetLastMeasure();
// do something with measure
// ...
}
private:
const SensorNetwork& sensors;
};
The previous code uses a mutex for clarity. A lock free alternative is shown in the following code:
class SensorNetwork
{
public:
SensorNetwork() :
timer( [this](){ OnTimerExpired(); } )
{
// just to be sure :-)
static_assert(current.is_always_lock_free); // c++17
timer.Start(10s);
}
shared_ptr<SensorAcquisition> GetLastMeasure() const
{
assert(current < 2);
return measures[current];
}
private:
void OnTimerExpired()
{
// filling = 1-current
assert(current < 2);
measures[1-current] = make_shared<SensorAcquisition>();
measures[1-current]->Scan([this](){ OnScanCompleted(); });
}
void OnScanCompleted()
{
current.fetch_xor(1); // current = 1-current
}
PeriodicTimer timer;
shared_ptr<SensorAcquisition> measures[2];
// c++14
atomic_uint current{0}; // filling = 1-current
};
Just in case you were wondering, you do need an atomic integer type here, although only one thread is writing it (have a look at C++ memory model to go down the rabbit hole).
Known Uses
Flip Model is used to retrieve the periodic diagnosis of network objects in several applications I worked on. Unfortunately, I cannot reveal the details given the usual confidentiality constraints that apply to these projects.
Related Patterns
- The pattern is somewhat similar to ‘Ping Pong Buffer’ (also known as “Double Buffer” in computer graphics), but Flip Model allows multiple clients to read the state, each at its convenient pace. Moreover, in Flip Model, there can be multiple data structures simultaneously, while in ‘Ping Pong Buffer’/‘Double Buffer’ there are always two buffers (one for writing and the other for reading). Finally, in ‘Ping Pong Buffer’/‘Double Buffer’, buffers are swapped, while in Flip Model the data structures are passed from the writer to the readers and eventually deleted.
Snapshotcan/should be a “Façade” for a complex data structure.Sourcecan use a “Strategy” to change the policy of update (e.g., periodic VS continuous).